TESS宇宙船-TESS|Spaceflight101
TESS宇宙船プラットフォーム
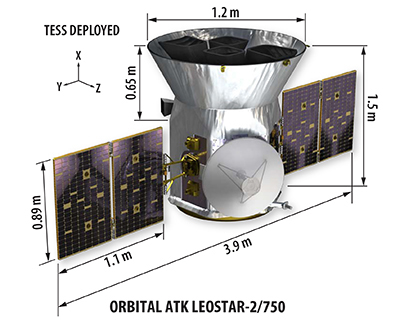
tess天文台は、オービタルatkのleostar-2衛星プラットフォームに基づいており、中小クラスの低地球軌道ミッションに適しており、最大210キログラムのペイロードをホストすることができる。 テスの重量は362Kgで、軌道上に完全に配備されたときの大きさは3.9×1.2×1.5メートルで、プラットフォームセクションとペイロードモジュールを備えています。
これは、2001年に発足して以来、その柔軟性を証明しているLEOStar-2プラットフォームを採用する第八のNASAのミッションをマークします。
TESS衛星構造は、一次負荷搬送要素として機能する六角形の本体で構成され、二つの発電太陽電池アレイや地球との高レート通信に使用される外部Kaバンドアンテナディッシュのような様々な内部および外部要素の実装構造を提供します。 六角形の構造の上に存在するのは、ペイロードインタフェースモジュールです。 アルミ合金の支柱および合成のパネルはすべての衛星部品に設置位置を提供する内部および外的な衛星構造を構成します。

衛星本体自体は1.5メートルの高さに立っており、周りの直径1.2メートルを測65cmすべてのペイロードセクション。 TESSは2つの展開可能な太陽電池アレイを採用しており、それぞれに2つのパネルがあり、1.1×0のアレイサイズを作成しています。89メートル、415ワットの電力を生産することができ、28ボルトの調整された電力バスを介して一連の電池と様々な衛星サブシステムに供給されます。 通常の運用中の観測所の典型的な電力消費量は290ワットと推定され、電力需要の増加と日食の期間に十分なマージンを提供します。
TESSは主に受動的な熱制御に依存しています–宇宙船の外装に使用される毛布と熱塗料は断熱材を提供し、余分な熱はラジエーターに接続されたヒ サバイバルヒーターは、最大食期間が五時間に制限されているため、TESSミッションで発生すると予想されていない長時間の寒さの浸漬の場合には、コアエレクトロニクスを動作させるために採用されている。


Tess宇宙船の姿勢決定と制御は、科学カメラによって収集された画像から生成された高精度の四分線に基づいて、微細な作動のための四つの反応車輪を用いた三軸制御されたゼロモメンタムシステムを採用している。 さらに、TESSは最初の獲得段階および他の非操作上の代表団段階の間に活動的な標準的な姿勢の決定センサーを用いる。
科学モードでは、TESSは、そのデータ処理ユニットを使用して、計器視野内の約200の測光ガイド星から重心を二秒のケイデンスで計算し、細かい姿勢 データ処理の単位は必須の訂正が反作用の車輪の入力に変形するマスターの航空電子工学の単位にこれらのquarternionsを渡す。P>


非科学ミッションフェーズの主な姿勢決定センサーとして選択されたのは、デンマークのdtu spaceによるmicro–advanced stellar compassであり、厳しい姿勢制御要件を持ついくつかの過去のミッションで飛行してきたコンパクトなスタートラッカーシステムである。 Μ ascスタートラッカーユニットは、二つの光学ヘッドと単一のデータ処理ユニットで構成され、大きなカタログから既知の星を識別し、宇宙での宇宙船の正確な三軸方向を計算するために、オンボードアルゴリズムによって分析される星で満たされた空の画像をキャプチャします。
DTUによると、μ ascは通常、デュアル冗長構成で動作し、2秒角に正確な姿勢ソリューションを提供し、毎秒20度までの姿勢レートをサポートし、毎秒8(公称)-22回の測定を生成し、宇宙で失われたシナリオからの初期取得には30ミリ秒しか必要としない。p>

さらに、TESSは、μ asc取得のためのボディレートの初期取得/減少中のボディレートの測定のための四つのジャイロスコープと、太陽陰の周りに設置された四つのサンセンサーからなる慣性測定ユニットをホストし、宇宙船のセーフモードイベント中にアレイを適切に指すための太陽ベクトルに関する情報を提供する。
TESS宇宙船の主な姿勢アクチュエータは、4つの反応車輪のアセンブリであり、3.2arcsecよりも精度の高い正確な三軸姿勢制御を提供し、0.05arcsec/hourの非常に高い安定性を持っています。 ハネウェルHR反応輪は、一つの車輪の損失のための冗長性を提供し、宇宙で動作する100万時間以上を蓄積してきた堅牢な設計を採用しています–ケプラーミッションがrwaの特定のメーカーの体系的な問題のために対処しなければならなかった反応輪の心配を解消します。


The TESS spacecraft employs a Hydrazine Monopropellant Propulsion System for orbit and attitude control, feeding a total of five thrusters from a central tank containing hydrazine propellant. すべてのスラスタは、金属触媒層上のヒドラジンをガス状の反応生成物に分解し、ノズルを介して高圧で排出することができるので、推力を生成する。 このシステムはブローダウンモードで動作し、ヒドラジンタンクの飛行前の加圧のみを使用し、飛行中の加圧システムは使用しません。
TESSは45キログラムの初期推進剤の負荷を運び、5ニュートン姿勢制御スラスタと単一の22ニュートン軌道操縦スラスタをホストし、すべて宇宙船の後部パネルに位置し、ミッションに毎秒268メートルの総デルタv予算を与えた。 主なミッションの設計によると、デルタ-vの215m/sは、2年間のミッション(初期軌道取得、太陽圧補償のための反応輪運動量ダンプ、ロケット噴射分散およびエンジン性能マージンを含む)のために予算されている。


tessミッションの中心的な要素は、中央データ処理ユニット(DHU)と125Mbit/sでデータを送信できるKaバンド通信端末を介して実現された宇宙船のデータ処理と通信能力である。
データ処理ユニットは、SEAKR Athena-3シングルカードコンピュータを中心に構築され、その処理とインターフェイス機能を容易にするために、いくつかのボード DHUの中心的な要素は、1GBのRAMと最大4GBのフラッシュメモリを備えた1066mhzのフリースケールプロセッサです。 主な画像処理タスクを担当し、宇宙船とのコマンド/データインターフェイスを構築します。 追加のカメラ処理タスクは、Virtex-5Field Programmable Gate Arrayによって処理されます。 合計192GBのフラッシュを備えた三つのソリッドステートバッファーカードがマスデータストレージを構築し、アナログ入出力パワースイッチングボードが計器の電力を制御し、専用の電源ボードがDHU電力を調整します。

TESSが採用する典型的なイメージングシーケンスは、カメラCCD検出器を2秒で動作させます露光時間とこれらの画像は、画像処理ボードに配信され、そこで60の連続したグループに合計され、二分の有効な露光が得られます。 これらの画像は、ターゲット星を中心とした通常10×10ピクセルのサブ配列ウィンドウのコレクションを表すデータ製品に処理されます。 サブアレイ値の抽出は、圧縮および質量メモリへの記憶の前にプロトン4 0 0kによって完了される。 フルフレームイメージも30分ごとに積み重ねられ、SSBに保存されます。
データダウンリンクは13ごとに一度だけ完了します。テスが近地点を通過してKaバンドリンクを介して最大のデータレートを可能にする7日間の軌道-宇宙船の地球の尖った方向へのスルーを容易にするために科学操作の16時間の中断を作成し、深宇宙ネットワークを介して4時間のダウンリンクと運用デューティ姿勢に戻ってスルーを作成します。
TESSには、宇宙船のサイドパネルの一つに設置された0.7メートルの放物線Kaバンドアンテナが装備されています。 それは2ワットの送信力で作動し、125までMbit/sデータ転送速度を達成する。 組の全方向性Sバンドアンテナは遠隔測定工学の下り回線およびtelecommandのアップリンクのためにtessが近地点の近くにない間、また命令が必要ならより