Qu’est-ce que la communication série et comment cela fonctionne ?
Introduction
La communication série est l’approche la plus utilisée pour transférer des informations entre les équipements de traitement de données et les périphériques. En général, la communication signifie l’échange d’informations entre les individus à travers des documents écrits, des mots verbaux, des leçons audio et vidéo.
Chaque appareil peut être votre ordinateur personnel ou votre mobile fonctionne selon le protocole série. Le protocole est la forme de communication sécurisée et fiable ayant un ensemble de règles adressées par l’hôte source (expéditeur) et l’hôte de destination (récepteur). Pour avoir un meilleur aperçu, j’ai expliqué le concept de communication en série.
Dans un système embarqué, la communication série est le moyen d’échanger des données en utilisant différentes méthodes sous forme de binaire numérique série. Certaines des interfaces bien connues utilisées pour l’échange de données sont RS-232, RS-485, I2C, SPI, etc.
Qu’est-ce que la communication série ?
En communication série, les données se présentent sous la forme d’impulsions binaires. En d’autres termes, on peut dire Binaire Un représente un HAUT logique ou 5 Volts, et zéro représente un BAS logique ou 0 Volts. La communication série peut prendre de nombreuses formes en fonction du type de mode de transmission et du transfert de données. Les modes de transmission sont classés comme Simplex, Semi-duplex et Duplex intégral. Il y aura une source (également appelée expéditeur) et une destination (également appelée récepteur) pour chaque mode de transmission.
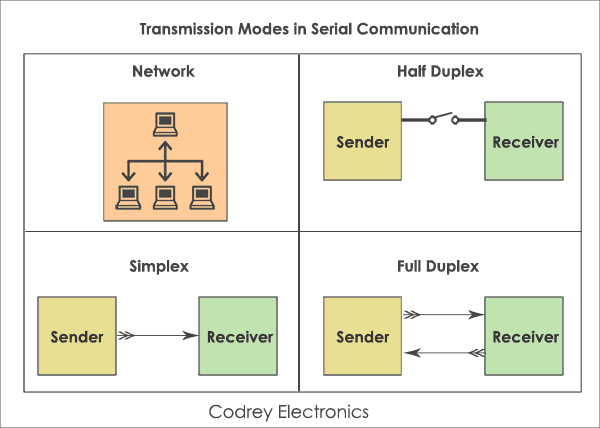
Modes de transmission – Communication série
La méthode Simplex est une technique de communication unidirectionnelle. Un seul client (l’expéditeur ou le destinataire est actif à la fois). Si un émetteur transmet, le récepteur ne peut qu’accepter. La transmission radio et télévisuelle sont les exemples du mode simplexe.
En mode semi-duplex, l’émetteur et le récepteur sont actifs mais pas à la fois, c’est-à-dire que si un émetteur transmet, le récepteur peut accepter mais ne peut pas envoyer et vice versa. Un bon exemple est Internet. Si un client (ordinateur portable) envoie une demande pour une page Web, le serveur Web traite l’application et renvoie les informations.
Le mode Duplex intégral est une communication largement utilisée dans le monde. Ici, l’expéditeur et le récepteur peuvent transmettre et recevoir en même temps. Un exemple est votre smartphone.
Au-delà des modes de transmission, il faut considérer l’endiannité et la conception du protocole de l’ordinateur hôte (émetteur ou récepteur). L’endianness est le moyen de stocker les données à une adresse mémoire particulière. Selon l’alignement des données, endian est classé comme
- Petit Endian et
- Grand Endian.
Prenez cet exemple pour comprendre le concept d’endianité. Supposons que nous ayons une donnée hexadécimale de 32 bits ABCD87E2. Comment ces données sont-elles stockées en mémoire ? Pour avoir une idée claire, j’ai expliqué la différence entre Little Endian et Big Endian.
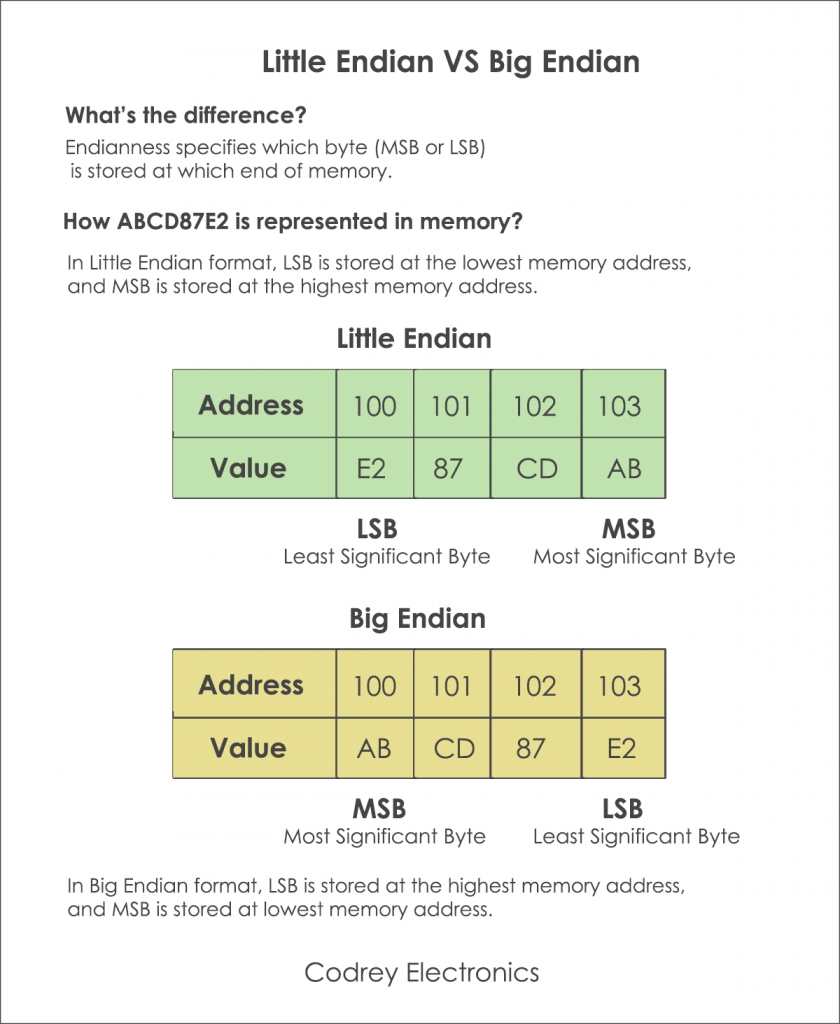
Petit Endian Vs Grand Endian
Le transfert de données peut se faire de deux manières. Il s’agit d’une communication série et d’une communication parallèle. La communication série est une technique utilisée pour envoyer des données bit par bit à l’aide d’un émetteur (émetteur) et d’un récepteur à deux fils.
Par exemple, je souhaite envoyer une donnée binaire 8 bits 11001110 de l’émetteur au récepteur. Mais, quel morceau sort en premier? Bit le plus Significatif – MSB (7ème bit) ou Bit le Moins Significatif – LSB (0ème Bit). Nous ne pouvons pas le dire. Ici, je considère que LSB se déplace en premier (pour little Endian).
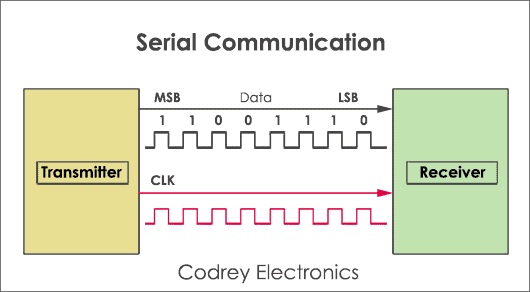
Communication série
À partir du diagramme ci-dessus, pour chaque impulsion d’horloge; l’émetteur envoie un seul bit de données au récepteur.
La communication parallèle déplace 8,16, ou 32 bits de données à la fois. Les imprimantes et les machines Xerox utilisent la communication parallèle pour un transfert de données plus rapide.
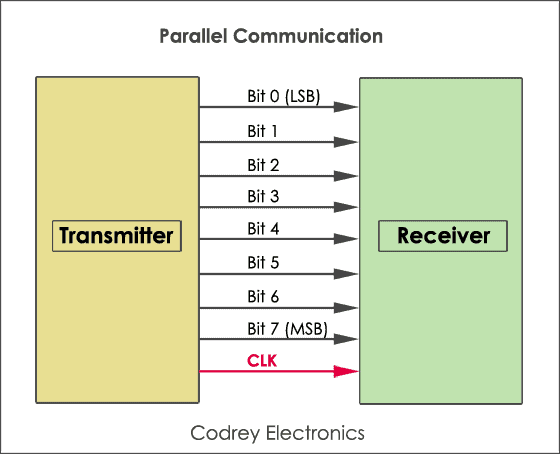
Communication parallèle RS232
Différence entre la communication série et la communication parallèle
La communication série n’envoie qu’un bit à la fois. ainsi, ceux-ci nécessitent moins de lignes d’E / S (entrée-sortie). Par conséquent, occupant moins d’espace et plus résistant aux conversations croisées. Le principal avantage de la communication série est que le coût de l’ensemble du système embarqué devient bon marché et transmet les informations sur une longue distance. Le transfert série est utilisé dans les appareils DCE (Équipement de communication de données) comme un modem.
En communication parallèle, un bloc de données (8,16 ou 32 bits) est envoyé à la fois. Ainsi, chaque bit de données nécessite une ligne d’E /S physique distincte. L’avantage de la communication parallèle est qu’elle est rapide mais son inconvénient est qu’elle utilise plus de lignes d’E / S (entrée-sortie). Le transfert parallèle est utilisé dans le PC (ordinateur personnel) pour interconnecter le CPU (unité centrale de traitement), la RAM (mémoire vive), les modems, le matériel audio, vidéo et réseau.
Remarque: Si votre circuit intégré ou votre processeur prend en charge moins de broches d’entrée / sortie, il est préférable d’opter pour la communication série
Pour une compréhension facile, voici la comparaison de la communication série et parallèle.
| Communication série | Communication parallèle |
|---|---|
| Envoie le bit de données par bit à une impulsion d’horloge | Transfère un bloc de données à la fois |
| Nécessite un fil pour transmettre les données | Nécessite un nombre ‘n’ de lignes pour transmettre ‘n’ bits |
| La vitesse de communication est lente | La vitesse de communication est rapide |
| Le coût d’installation est faible | Le coût d’installation est élevé |
| Préféré pour la communication longue distance | Utilisé pour la communication à courte distance |
| Exemple: Ordinateur à ordinateur | Ordinateur à imprimante multifonction |
Synchronisation de l’horloge
Pour un fonctionnement efficace des périphériques série, l’horloge est la source principale. Un dysfonctionnement de l’horloge peut entraîner des résultats inattendus. Le signal d’horloge est différent pour chaque périphérique série, et il est classé comme protocole synchrone et protocole asynchrone.
Interface série synchrone
Tous les périphériques de l’interface série synchrone utilisent le bus CPU unique pour partager l’horloge et les données. De ce fait, le transfert de données est plus rapide. L’avantage est qu’il n’y aura pas de décalage en vitesse de transmission. De plus, moins de lignes d’E/ S (entrée-sortie) sont nécessaires pour interfacer les composants. Les exemples sont I2C, SPI, etc.
Interface série asynchrone
L’interface asynchrone n’a pas de signal d’horloge externe, et elle repose sur quatre paramètres à savoir
- Contrôle de débit en bauds
- Contrôle de flux de données
- Contrôle d’émission et de réception
- Contrôle d’erreur.
Les protocoles asynchrones conviennent à une communication stable. Ceux-ci sont utilisés pour les applications longue distance. Des exemples de protocoles asynchrones sont RS-232, RS-422 et RS-485.
Comment fonctionne la communication série ?
Les processeurs avancés tels que le microcontrôleur et le microprocesseur utilisent la communication série pour communiquer avec le monde extérieur ainsi que sur les périphériques de la puce. Pour vous familiariser, prenons un exemple simple. Par exemple, vous souhaitez envoyer un fichier présent dans votre ordinateur portable vers un smartphone. Comment enverriez-vous? Probablement en utilisant le protocole Bluetooth ou WiFi, Non.
Voici donc les étapes pour établir la communication série
- Ajouter la connexion.
Dans la première étape, votre ordinateur portable recherchera les appareils à proximité de 100 mètres et répertoriera les appareils trouvés. Ce processus est souvent appelé itinérance.
- Sélectionnez l’appareil que vous souhaitez communiquer.
Pour se connecter à votre mobile, l’appairage doit être effectué. La configuration par défaut est déjà présente dans le logiciel. Donc pas besoin de configurer le débit en bauds manuellement. Au-delà de cela, il y a quatre règles inconnues. Il s’agit du débit en bauds, de la sélection de bits de données (cadrage), du bit de démarrage-arrêt et de la parité.
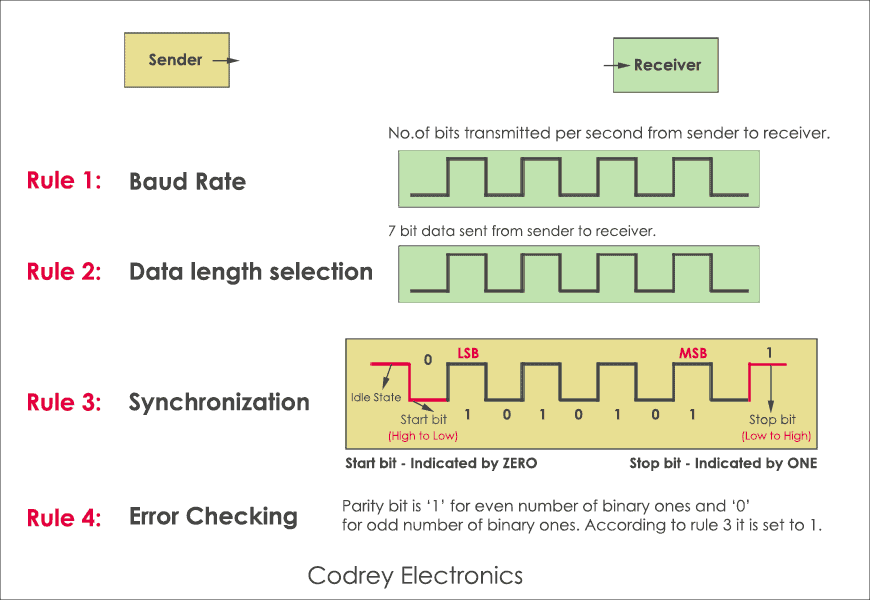
Règles de Communication série
#1 Qu’est-ce que le débit en Bauds?
Le débit en bauds est la vitesse de transfert des données de l’émetteur vers un récepteur sous forme de bits par seconde. Certaines des vitesses de transmission standard sont 1200, 2400, 4800, 9600, 57600.
Vous devez régler la même vitesse de transmission des deux côtés (Mobile et Ordinateur portable).
Remarque: Plus un débit en bauds est élevé, plus de données peuvent être transférées en moins de temps.
Cependant, je recommande d’utiliser jusqu’à 115200 comme limite de sécurité en raison de l’inadéquation de la fréquence d’échantillonnage à l’extrémité du récepteur.
#2 Cadrage
Le cadrage indique le nombre de bits de données que vous souhaitez envoyer du périphérique hôte (ordinateur portable) au mobile (récepteur). Est-ce 5, 6, 7 ou 8 bits? La plupart du temps de nombreux appareils, 8 bits sont préférés. Après avoir sélectionné le bloc de données de 8 bits, l’endianness doit être acceptée par l’expéditeur et le destinataire.
#3 Synchronisation
L’émetteur ajoute des bits de synchronisation (1 bit de démarrage et 1 ou 2 bits d’arrêt) à la trame de données d’origine. Les bits de synchronisation aident le récepteur à identifier le début et la fin du transfert de données. Ce processus est connu sous le nom de transfert de données asynchrone.
#4 Contrôle d’erreur
Une corruption des données peut se produire en raison d’un bruit externe à l’extrémité du récepteur. La seule solution pour obtenir la sortie stable est de vérifier la parité.
Si les données binaires contiennent un nombre pair de 1, elles sont appelées parité paire et le bit de parité est défini sur ‘1’. Si les données binaires incluent un nombre impair de 1, on parle de parité impaire, et maintenant le bit de parité est défini sur ‘0’.
Protocoles série asynchrones
La question la plus courante qui vous viendra à l’esprit lorsque vous commencerez à travailler sur le système embarqué est de savoir pourquoi utiliser des protocoles asynchrones ?
- Pour déplacer les informations à une distance plus longue et
- Pour un transfert de données plus fiable.
Certains des protocoles de communication asynchrones sont :
Protocole RS-232
- RS232 est le premier protocole série utilisé pour connecter des modems pour la téléphonie. RS signifie Norme recommandée, et maintenant il est devenu EIA (Electronic Industries Alliance) / TIA (Telecommunication Industry Association).
- Il est également utilisé dans les machines modem, souris et CNC (calcul numérique). Vous ne pouvez connecter qu’un seul émetteur à un seul récepteur.
- Il prend en charge la communication en duplex intégral et permet un débit en bauds jusqu’à 1 Mbps.
- La longueur du câble est limitée à 50 pieds.
Comme vous le savez, les données stockées dans la mémoire sont sous forme d’octets. Vous pouvez avoir un doute Sur la façon dont les données en octets sont-elles converties en bits binaires? La réponse est un port série.
Le port série possède une puce interne appelée UART. UART est un acronyme pour Universal Asynchronous Receiver Transmitter qui convertit les données parallèles (octet) sous forme série au niveau du bit.
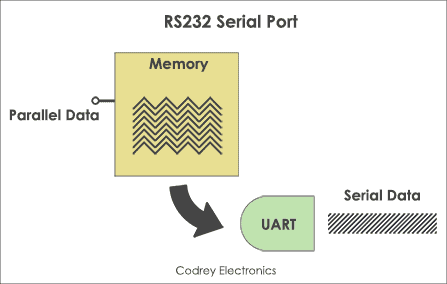
Port série RS232
Connexion de câblage RS-232
Le port série RS232 a neuf broches, modèles de type mâle ou femelle. L’interface de communication série RS 232C est la version ultérieure de RS232.
Toutes les fonctionnalités présentes dans le RS232 sont présentes dans le modèle RS232C à l’exception de ses 25 broches. Sur 25 ou 9 broches, nous n’utilisons que trois broches pour la connexion des terminaux.
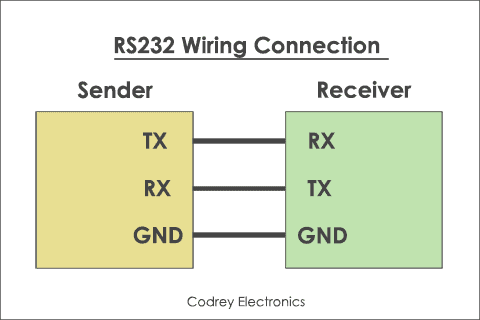
Connexion de câblage RS232
Interface RS422
Nous ne pouvons transférer des données que jusqu’à une limite de 1Mpbs en utilisant RS232. Pour surmonter ce problème, RS422 entre en jeu. RS422 est une interface série multi-gouttes. nous pouvons connecter dix émetteurs à 10 récepteurs à la fois en utilisant le bus unique. Il envoie des données à l’aide de deux câbles à paires torsadées (configuration différentielle). La longueur du câble est de 4000 pieds avec un débit en bauds de 10 Mbps.
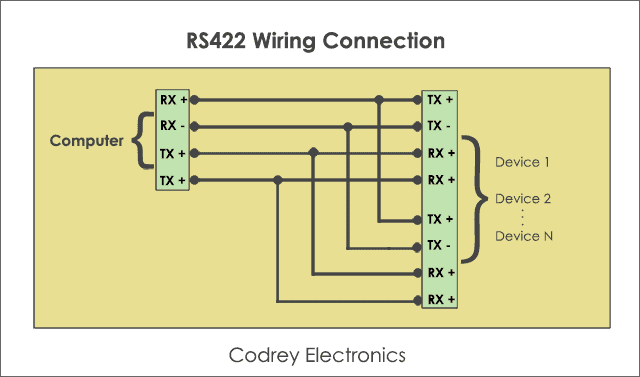
Connexion de câblage RS 422
Interface RS485
RS485 est le protocole préféré de l’industrie. Contrairement au RS422, vous pouvez connecter 32 pilotes de ligne et 32 récepteurs dans une configuration différentielle. L’émetteur est également appelé pilote de ligne. Cependant, un seul émetteur est actif à la fois.
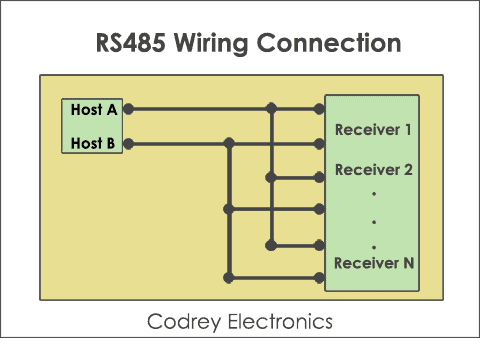
Connexion de câblage RS485
Remarque: Pour RS232 et RS485, vous devez terminer la connexion manuellement.
Protocole à 1 fil
Un fil est similaire au protocole I2c. Mais, la différence est qu’un protocole filaire utilise une seule ligne de données et une seule terre. Il ne nécessite aucun signal d’horloge et les esclaves sont cadencés à l’aide d’un oscillateur à cristal interne. Il fournit une communication semi-duplex.
Un fil utilise un schéma d’adressage 64 bits. L’avantage d’une interface de fil est qu’elle prend en charge la communication longue distance à faible coût. Mais, l’inconvénient est que sa vitesse est moindre.
Les protocoles câblés asynchrones sont bien adaptés à la communication longue distance. Cependant, il existe un inconvénient donnant une portée aux interfaces série synchrones.
L’inconvénient est que s’il est nécessaire de connecter plus d’émetteurs et de récepteurs, le coût d’installation devient élevé.
Protocoles série synchrones
Les protocoles de communication synchrones sont les meilleures ressources pour les périphériques embarqués. L’avantage est que vous pouvez interfacer plus d’appareils sur le même bus. Certains des protocoles synchrones sont I2C, SPI, CAN et LIN.
Protocole I2C
I2c (circuit inter-intégré) est un protocole bidirectionnel à deux fils utilisé pour un échange de données entre différents périphériques sur le même bus. I2c utilise une adresse 7 bits ou 10 bits permettant de connecter jusqu’à 1024 périphériques. Mais, il nécessite un signal d’horloge pour générer des conditions de démarrage et d’arrêt. L’avantage est qu’il fournit un transfert de données à 400 kbps. Il convient à la communication embarquée.
Protocole SPI
Protocole SPI (Serial peripheral interface) envoyer et recevoir des données en flux continu sans interruption. Ce protocole est recommandé pour la communication de données à grande vitesse est nécessaire. La vitesse maximale qu’il peut fournir est de 10 Mbps.
Contrairement à i2c, SPI a 4 fils. Ils sont MOSI (Master out slave in), MISO (Master in slave out), Horloge et signal de sélection d’esclave. Théoriquement, nous pouvons connecter un nombre illimité d’esclaves et cela dépend pratiquement de la capacité de charge du bus.
Protocole CAN
Ce protocole est dédié aux systèmes de véhicules ou aux automobiles. C’est un protocole orienté message utilisé pour le câblage électrique multiplex afin d’économiser le cuivre. C’est un bus série multi-maître utilisé dans des applications telles que le démarrage / arrêt automatique des véhicules, les systèmes d’évitement de collision, etc.
USB
L’interface USB est la meilleure alternative aux ports série ou parallèles. Le transfert de données associé aux ports USB est assez rapide que l’interface série et parallèle. USB prend en charge des vitesses de 1,5 Mbps (USB 1.0) à 4,8 Gbps (USB 3.0). Aujourd’hui, la plupart des périphériques embarqués utilisent la technique USB OTG (On the Go programming) pour vider le fichier hexadécimal sur le microcontrôleur.
Microwire
Microwire est un protocole de communication série à trois fils. Il dispose d’un port d’E / S série sur le microcontrôleur pour s’interfacer avec des puces périphériques. Il prend en charge la vitesse jusqu’à 3 Mbps. Il est plus rapide que i2c et le sous-ensemble du protocole SPI.
Conclusion
La communication série est la partie essentielle dans le domaine de l’électronique et des Systèmes embarqués. Le taux de transfert de données est critique si deux appareils souhaitent échanger des informations sur le même bus. Par conséquent, il est nécessaire de choisir un protocole série valide pour toute application.
Lire aussi: Qu’est-ce qu’un système embarqué et comment cela fonctionne ?